Robots that learn the job themselves.
ReflexOS turns a robot arm into an MCP server. An AI agent operates it, watches what happens, recovers from its own mistakes, and saves what works as a reusable reflex, so a new task needs far less teleoperation and engineering.
Built for the places where every workflow is a little different
Teaching a robot a new task is still slow, costly, and human-bound.
The real cost is rarely the hardware. It is the time and expertise needed to adapt the robot to each new environment, object, and workflow. Today that adaptation looks like one of these, usually all of them.
Human teleoperation
An operator drives the arm by hand for hours so the system has something to imitate.
Leader-follower demonstrations
Every motion is shown on a second arm, then replayed and hand-tuned until it holds.
Simulation datasets
Engineers build and label synthetic scenes that still break the moment reality differs.
Endless correction loops
Policies are retuned, more data is collected, the robot is retrained, and the cycle repeats.
Human teleoperation
Leader-follower demonstrations
Simulation datasets
Endless correction loops
From demonstration-first to exploration-first.
A human still owns the objective and the boundaries. The agent does the trial, the correction, and the workflow discovery.
Demonstration-first / today
- A human demonstrates every task by hand
- Motions are hardcoded into fixed trajectories
- A changed object position breaks the workflow
- New tasks mean more demos and more engineering
Exploration-first / ReflexOS
- A human defines the goal and the safety limits
- The agent explores the robot's real action space
- Failures are diagnosed, corrected, and retried
- What works is saved as a reusable reflex
Operate, observe, correct, remember.
The loop runs with the agent in control of the trial and error. It keeps tightening until a workflow is reliable enough to become a reflex.
Expose the robot as tools
Joints, camera, gripper, movement, state, and safety limits all become MCP tools the agent can call.
Give the agent a goal
A plain objective: pick, place, sort, inspect, or recover. No trajectory, no script.
Let the agent operate
The agent inspects state, tests possible actions, and drives the arm in a real or simulated scene.
Observe the result
Camera and sensor feedback confirm whether the action actually succeeded or failed.
Reason and correct
On failure the agent explains why, adjusts the grasp or approach, and tries a better strategy.
Record successful behavior
The movement, rationale, sensor state, and outcome are saved as robot memory.
Convert memory into reflexes
Repeated successful workflows stop needing reasoning and replay as fast, reliable skills.
Reduce training time
Each future workflow needs fewer human demonstrations and less engineering intervention.
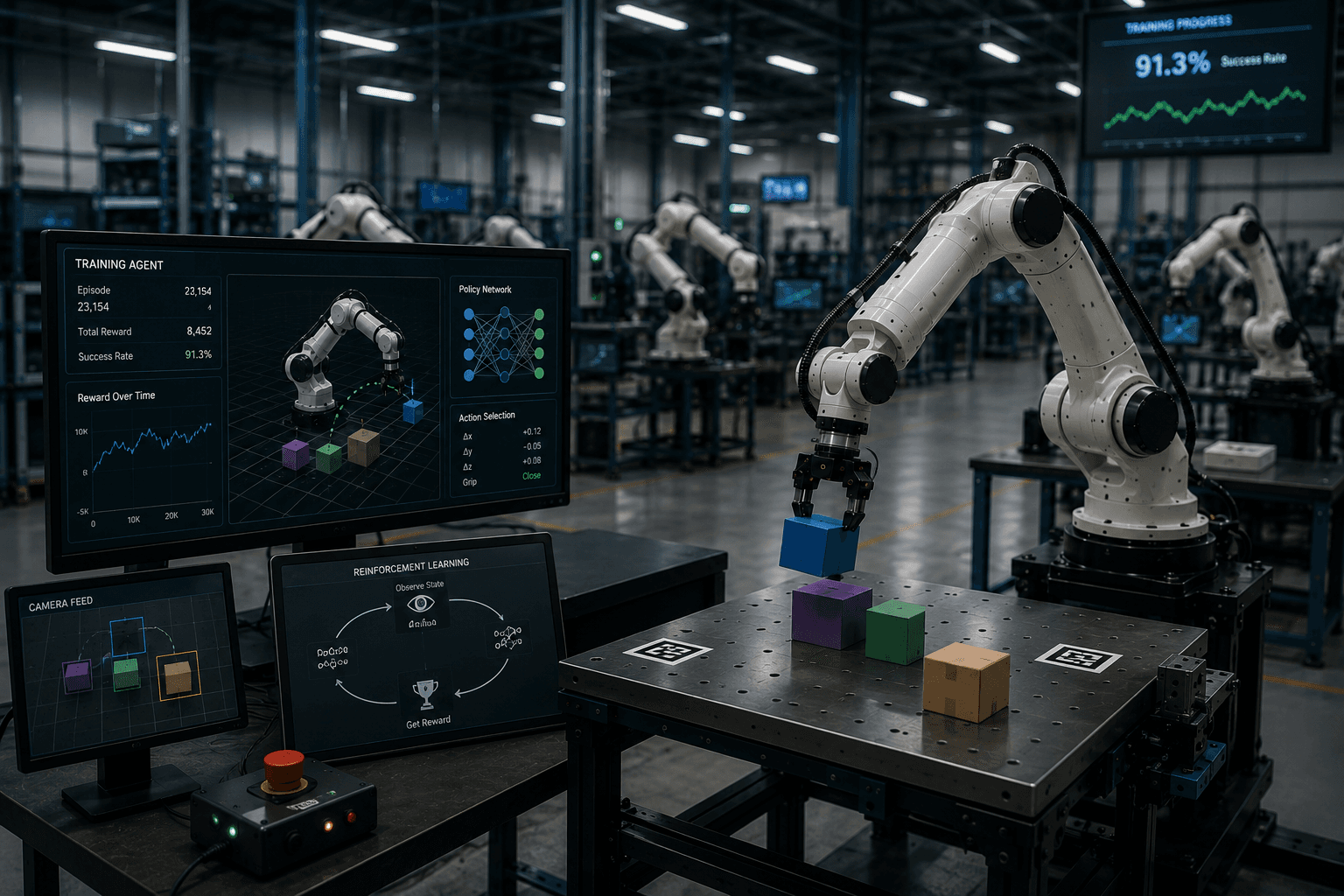
Mission control, not a mock console.
The animated console above shows the story. The live demo puts you in a 3D warehouse scene with a robot arm, camera view, and agent panel — the same training loop, rendered in real time.
- 6-DOF arm + gripper
- Live camera feed
- Agent tool calls
One standard interface for the whole robot.
MCP turns the robot into something an agent can read and reason about, not a black box behind a custom SDK.
The robot's body, as tools
Camera, state, joints, gripper, movement, home position, and safety limits are exposed as callable MCP tools. Each action becomes part of an action space the agent understands.
Agent-driven exploration
The agent inspects state, sees which movements are possible, tries positions, watches outcomes, and corrects, instead of waiting for a human to demonstrate.
Memory becomes reflexes
A successful trajectory, its rationale and sensor state are stored. Seen again, the workflow replays as a fast reflex instead of reasoning from scratch.
Cross-robot skill transfer
A skill is a workflow, not a fixed motion path. If a new arm exposes equivalent tools, the agent retests and saves a robot-specific reflex.
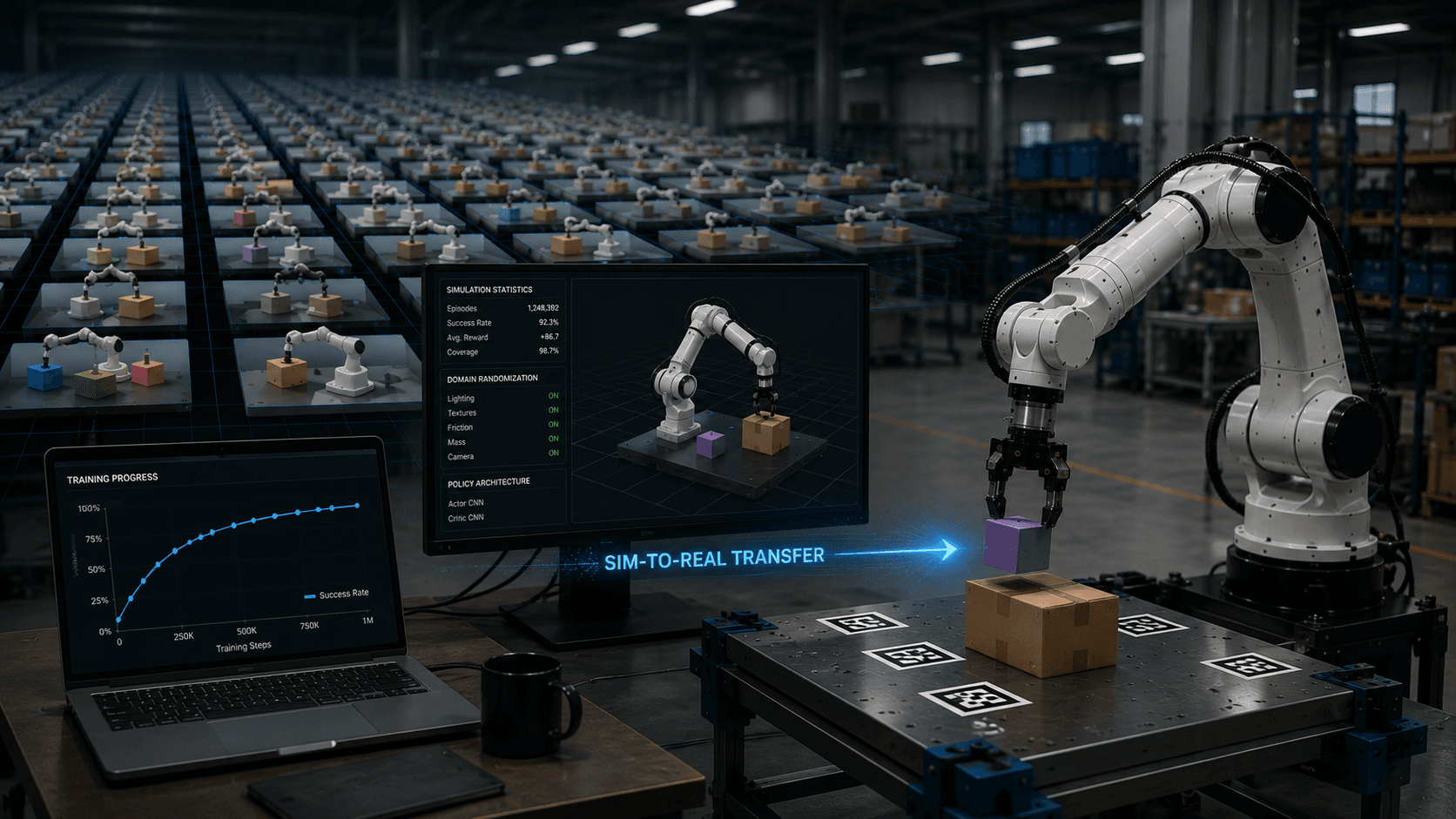
Synthetic-to-real correction
The agent compares the simulated plan with the real outcome, finds where it broke, and records the physical correction as reusable memory.
Human-owned boundaries
People define the objective and the safety envelope. Joint and force limits stay enforced while the agent does the trial and error.
A sorting robot that trains itself on the line.
Traditionally, engineers collect demonstrations, program fixed motions, test edge cases, and hand-correct failures. Move the package or miss the grip, and the workflow breaks.
With ReflexOS the arm connects as an MCP server. The agent sees the package, checks joint state, tests a grasp, verifies the pick, and places it. When it misses, it does not stop. It reasons about the failure, tries a new grasp, and saves the recovery.
- How to approach the object
- Which grasp angle actually works
- Which joint sequence stays safe
- How to verify the object was picked
- How to recover from a missed grasp
- How to place it in the correct bin
Cut the cost of putting robots to work.
By moving trial, correction, and discovery onto the agent, ReflexOS targets the expensive parts of every deployment. These are the outcomes the system is built to deliver as it matures.
The long-term vision is a new training layer for robot workers, where robots are not reprogrammed for every workflow but learn through AI-guided operation, memory, and reflex formation.
Answers before you connect an arm.
Any arm that can expose its camera, state, joints, gripper, movement, home position, and safety limits as MCP tools. The interface is what matters, not the specific brand of hardware.
Let the agent do the training.
Connect a robot as an MCP server, set a goal and safety limits, and watch it learn the workflow, recover from failures, and turn what works into reflexes.